



.png)








Giải thuật điều khiển cho robot 6 bậc
Bài báo “Nghiên cứu thiết kế bộ điều khiển và xây dựng giải thuật điều khiển cho robot 6 bậc tự do ứng dụng trong đào tạo”.
Tác giả: Phùng Trí Công, Nguyễn Tấn Tiến, Nguyễn Tấn Đạt, Nguyễn Ngọc Sơn.
Trích trong Tạp chí Phát triển Khoa học và Công nghệ - Kỹ thuật và Công nghệ, tập 1, số 2, 2018.
Bài báo này trình bày một phương pháp thiết kế bộ điều khiển và xây dựng giải thuật điều khiển cho các robot công nghiệp nhằm mục đích xây dựng các bài thí nghiệm phục vụ cho đào tạo. Robot được sử dụng trong bài báo là robot SV3X của hãng MOTOMAN.
Trong nghiên cứu này, nhóm sẽ trình bày phương pháp thiết kế và phục hồi bộ điều khiển cho một robot đã qua sử dụng. Một giao diện mới điều khiển robot cũng được thiết kế dựa trên nền tảng ngôn ngữ C#. Kế đến nhóm sẽ đề xuất các giải thuật có thể thực hiện được dựa trên bộ điều khiển thiết kế. Hai giải thuật được kiểm chứng là lập trình điều khiển robot bám theo quỹ đạo cho trước và hoạch định quỹ đạo cho quá trình gắp và thả vật. Cuối cùng, độ chính xác lặp lại của robot cũng như các giải thuật đề nghị sẽ được kiểm chứng bằng thực nghiệm
Ghi tài liệu tham khảo theo IEEE:
[1] “Nghiên cứu thiết kế bộ điều khiển và xây dựng giải thuật điều khiển cho robot 6 bậc tự do ứng dụng trong đào tạo”. http://stdjet.scienceandtechnology.com.vn/index.php/stdjet/article/view/562/831 (truy cập tháng 5 22, 2020).
Đọc toàn văn:
http://stdjet.scienceandtechnology.com.vn/index.php/stdjet/article/view/562/831
Giải thuật điều khiển cho robot 6 bậc

Đánh giá tiềm năng gió và tối ưu hoá tua-bin
Bài báo “Đánh giá tiềm năng gió và tối ưu hoá tua-bin trong trang trại điện gió sử dụng phần mềm WAsP và WindPRO”.
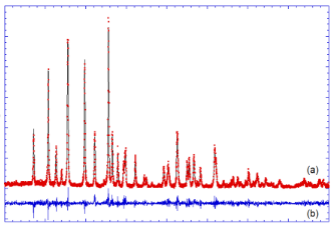
Đan cài ion Na+ vào olivine LiFePO4
Bài báo “Nghiên cứu quá trình đan cài ion Na+ vào cấu trúc olivine LiFePO4”.

Chế tạo hạt Fe3O4 tách chiết DNA
Bài báo “Chế tạo hạt nano Fe3O4 nhiều kích thước ứng dụng trong tách chiết DNA từ mẫu sinh học”.

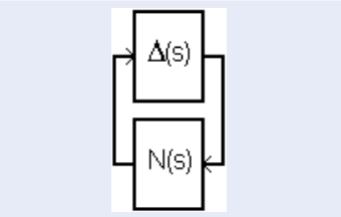
Thông số điện máy biến áp
Bài báo “Nhận dạng thông số điện máy biến áp lực áp dụng chẩn đoán sự cố”.
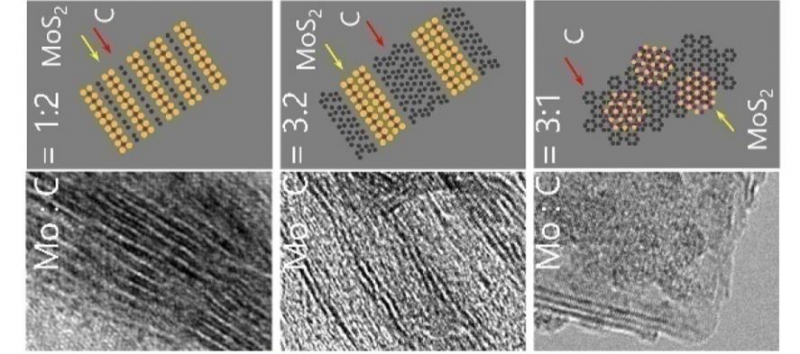
Controllable synthesis of MoS2/graphene low-dimensional nanocomposites
Full Length Article “Controllable synthesis of MoS2/graphene low-dimensional nanocomposites and their electrical properties”
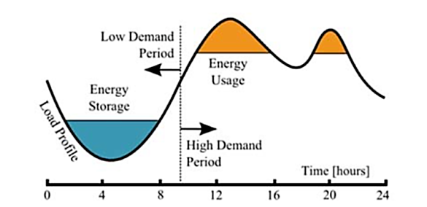
Điều phối dòng công suất cho lưới điện Microgrid
Bài báo “Mô phỏng điều phối dòng công suất cho lưới điện Microgrid sử dụng hệ thống năng lượng mặt trời và hệ thống pin lưu trữ năng lượng”

Synthesis of silver/reduced graphene oxide for antibacterial activity
Full Length Article “Synthesis of silver/reduced graphene oxide for antibacterial activity and catalytic reduction of organic dyes”.
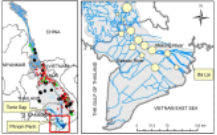
Morphological change assessment from intertidal to river-dominated zones using multiple-satellite imagery
Full Length Article “Morphological change assessment from intertidal to river-dominated zones using multiple-satellite imagery: A case study of the Vietnamese Mekong Delta”.
- Vòng Sơ Khảo Cuộc Thi Đại Sứ Văn Hóa Đọc Năm 2024
- Hoạt động chào mừng "Ngày sách Việt Nam 21/4/2024"
- Ngày hội văn hóa đọc lần V
- Cuộc Thi Ảnh “Khoảnh Khắc VNUHCM Libraries”
- Ngày hội văn hóa đọc lần II
- Ngày hội văn hóa đọc lần IV
- Ngày hội văn hóa đọc lần III
- Tiếp GS Omer Mert Denizci, Trường ĐH Marmara Thổ Nhĩ Kỳ
- Tiếp Cô Claudia Tarzariol Từ The University Of Trento, Italy (Unitrento)
- Tiến sĩ kiều bào Mỹ tặng sách trị giá 150.000 USD cho sinh viên bách khoa
- Khảo sát ý kiến bạn đọc
-
Trực tuyến:5
-
Hôm nay:1125
-
Tuần này:1125
-
Tuần trước:33918
-
Tháng trước:33918
-
Tất cả:4023021
.png "Logo Bottom")